基于STM32单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪
”MPU6050 51单片机 卡尔曼滤波器“ 的搜索结果
基于51单片机实现MPU6050的卡尔曼滤波算法(小车)代码分享 博主github: https://github.com/MichaelBeechan
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵乘法和求逆运算。考虑应用场合可以对滤波器适当做一些简化,计算量会大大减小。选取状态为俯仰角和滚转角带来的问题是状态方程必须使用...
如果两个变量的变化趋势一致,也就是说如果其中一个变量大于其自身的期望值,另一个变量也大于其自身的期望值,那么这两个变量的协方差就是正的。以横滚角为例,X轴旋转需要一个初始角度,Y、Z轴都会跟随X轴旋转而...
基于51单片机平衡车卡尔曼滤波源码,6轴MPU6050+互补滤波
之前写过一个博客(代码分享:单片机开发 | 基于51单片机实现MPU6050的卡尔曼滤波算法(代码类1)),有很多问题读者都没搞清楚,现在将余下的代码分享出来,望批评指正: MPU6050.h /***********************...
mpu6050和卡尔曼滤波

========================================== ...本文设计了一种基于STM32/51单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪(直接上代码) 代码下载(附PPT) MPU-6050 :是6轴运动处理
基于STM32单片机的使用MPU6050传感器的利用卡尔曼滤波器算法的角度测量仪 相关下载链接://download.csdn.net/download/u011344545/14946144?utm_source=bbsseo

github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ============================================================ #include <REG52.H> #include <math.h>...#in...

预告:代码及文档下载 一、文档主要包含资料 ...1、卡尔曼滤波(matlab代码) clear clc; N=50; CON = 25; %房间温度,假定温度是恒定的 % 系统方程 % x(k+1)=x(k)+w; % 状态方程 % y(k)=x(k)+v; % 观测方程 %%%%%%%%%
方法一、使用卡尔曼滤波进行姿态解算,不过好像只能计算出翻滚角和俯仰角。方法二、移植官方dmp库,可以得到偏航角,翻滚角,俯仰角。这里只使用VCC,GND,SCL,SDA4个引脚。XDA:连接其他i2c设备的主机数据口。这里...
如果你是想直接简单运用卡尔曼滤波来处理mpu6050的数据,或者是处理ADC的数据,那么我希望这篇笔记可以帮助到你。 卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统...
最近看到MPU6050模块有dmp处理功能,并且相关资料上表示接入第三方磁力计,可以使用dmp的九轴...反正6050也没有办法用dmp来做九轴融合,只能在单片机上融合了,实际上这反而给我们学习AHRS的动力,这次希望通过学习总结
①使用uno和nano:VCC-5V GND-GND SDA-A4 SCL-A5②使用esp8266:VCC-3V GND-GND SDA-D2 SCL-D1。
基于9轴惯性运动传感器的三阶卡尔曼滤波器算法 最近在玩九轴的惯性传感器,很是有挑战性.九轴说的是三轴的加速度计、三轴的陀螺仪以及三轴的磁场传感器。但是只是单纯的测出九个轴的数据没什么用,关键是要能够融合...
一直以来用过很多次KALMAN滤波,没有进行系统的总结,本次笔记将对此进行从原理到推导到代码实现及应用进行总结和分析,阐述一些个人使用的观点。...卡尔曼滤波器由一系列递归数学公式描述。它们提供了一...
最近在网上买了一块6050模块,用店家的给的代码,他用的是6050自带的dmp来直接得到姿态的 可是,如果拿着模块在空中剧烈翻转的话,就会有二十多度的误差,如果用卡尔曼滤波的话,会不会有这么严重的误差呢?
综合了网上的一些资料,编写的一个基于MSP430F149单片机控制MPU-6050测量倾角和倾角加速度并用卡尔曼滤波的软件,采用模块化划分的方式,改善了网上的程序都是采用一个文件而导致程序不好阅读的问题。
上一篇文章有讲到卡尔曼滤波了,现在需要将其添加到我们之前的C52测试程序中。 STM32 相关工程,下载:STM32F10x 卡尔曼滤波 一、再看一下卡尔曼滤波程序 #include<math.h> #include "stm32...
总结起来,使用MPU6050进行姿态解算时,可以选择使用卡尔曼滤波法,并根据具体需求调整滤波器的参数。可以参考引用\[1\]中提供的源码来实现卡尔曼滤波算法。 #### 引用[.reference_title] - *1* *2* [【51单片机快速...

卡尔曼滤波解算欧拉角初始化主要函数 初始化 CPU1初始化代码 #include "..\Driver\include.h"//各个模块的头文件 extern IfxCpu_mutexLock mutexCpu0InitIsOk; /** CPU0 初始化完成标志位 */ int core1_main (void) ...
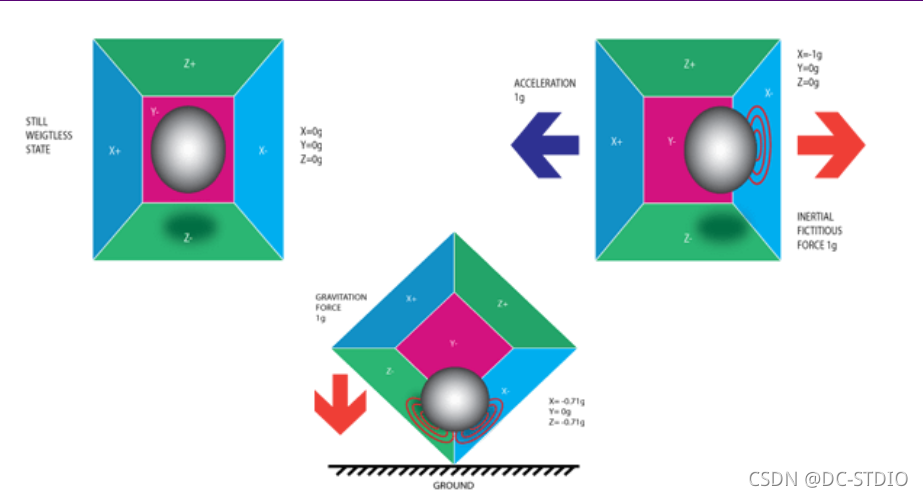
首先要明确,MPU6050 是一款姿态传感器,使用它就是为了得到待测物体(如四轴、平衡小车) x、y、z 轴的倾角(俯仰角 Pitch、滚转角 Roll、偏航角 Yaw) 。我们通过 I2C 读取到 MPU6050 的六个数据(三轴加速度 AD ...
STM32卡尔曼滤波
推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地